
RflySim采用基于模型设计(Model-BasedDesign,MBD)的思想,专为无人机飞控开发、大规模集群协同、人工智能视觉等前沿研究领域研发的一套高可信度的无人控制系统统一开发、测试与评估平台。
支持多旋翼、车、固定翼、垂直起降飞行器、船、直升机。采用分布式构架,非常适合大规模集群与视觉仿真测试开发。我们提供了源码和教程帮助用户在虚幻4和5(UE4,UE5)中搭建高度逼真的3D场景,用于室内外环境仿真或者基于视觉算法的开发。
提供了完善的开发工具链,具有详细的指导教程,在Windows平台下进行一键安装、一键代码生成、一键固件部署、一键软硬件在环仿真和快速实飞,非常方便易用。用户不需要了解飞控源码、Linux编程、C/C++编程、网络通信、飞机组装等底层知识,只需具备基础的Simulink(或Python)知识,即可快速将自己的算法经过层层验证并应用于真机上,有助于更专注于算法的开发与测试。
利用MATLAB/Simulink支持MBD的整个设计阶段,形成控制/视觉/集群算法开发的核心编程平台。基于MATLAB/Simulink和Python,专门设计RflySim的软件接口和工具。提供丰富的Python视觉处理库,SLAM等视觉闭环控制,底层姿态、滤波、位置控制的算法开发课程与例程代码。
平台支持多种定位系统和集群通信技术,在统一控制接口下实现无人机、无人车的按照规划路线运动,验证多机、多车编队和协同控制等算法的有效性。

教育行业:机器人/多智能体/无人机的视觉、集群算法开发教学实验平台或科研实验平台。适用于无人机教学与研究,是本科生、硕士生、博士生和科研人员理想的实验和研究平台。
行业应用:无人控制系统的快速设计、仿真验证与真机实验平台。具有自动化安全测试、评估功能。可以根据行业客户需求定制大规模集群、多机视觉等功能。

产业化

已申请专利5项


图1基于UE4的无人机虚拟现实仿真场景

图2无人车的半实物仿真平台
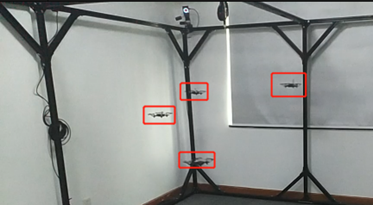
图3基于视觉定位的室内集群实验平台
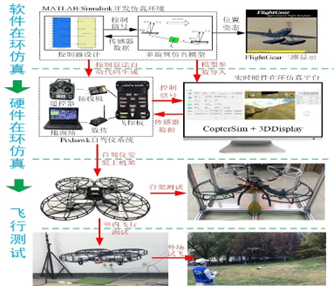
图4 基于Simulink自动代码生成的控制算法快速开发平台
(未经授权禁止转载)


