
针对矿井恶劣环境中绝对定位信息缺失,利用多源融合感知技术,构建可行驶区域两侧边缘,利用中心参考轨迹种子点生成拟合跟踪轨迹。建立势场态势图,实现智能矿用掘进机井下动态避障,并设计了自适应变参数的轨迹跟踪导航控制方法,突破了智能矿用掘进机矿井下自主导航规划的技术瓶颈。
提供了一种矿井下智能驾驶的局部路径规划方法及系统,自适应调整轨迹,实现路口前矿车的横向校正,保证矿车安全的通过路口,提高下无人矿车在分岔路口的安全性;提供了一种智能掘进机横向优化控制方法及系统,在粉尘碎石恶劣环境下,并缺乏绝对定位信息时,实现智能矿用掘进机井下精确横向轨迹跟踪控制技术;提供了一种智能驾驶的自底向上平滑轨迹生成方法及系统,保证在直线路线参考点处于道路中间,在弯道路段参考点处于弯道内侧,提高掘进机行驶过程中的安全性。

成果在矿下掘进机的智能驾驶中得到广泛应用,特别是智能网联矿用汽车的自主导航过程中,如井下定位、融合建图、路径规划、轨迹跟踪控制方面等。成果可为智慧矿山的减人化或无人化提供技术支持。同时可改善矿业工人作业环境,提高安全系数。

产业化

已授权专利3项

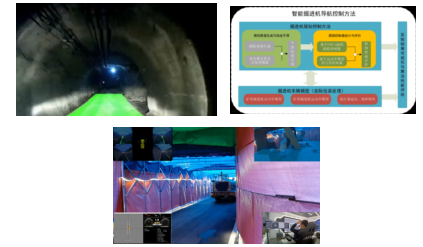
智能矿用掘进机井下导航控制技术
(未经授权禁止转载)


