为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

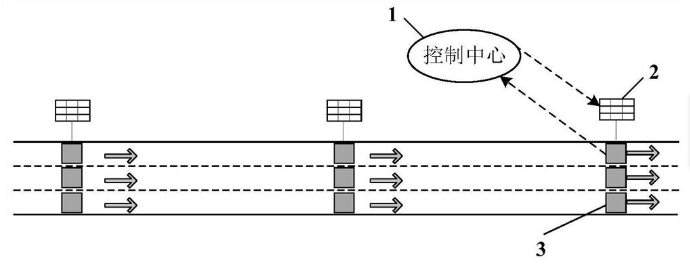
本发明公开了一种基于时间稳定性的高速公路限速控制方法,该方法通过高速公路路侧情报板、路段检测器、控制中心的三者协同控制,利用时间稳定性约束条件进行限速控制,以提高高速公路动态限速控制的安全性,减少道路交通事故率。本发明包括以下几个步骤:检测采集交通信息,确定各位置备选限速值,基于时间稳定性选择最优空间限速函数,确定最终限速值。本发明方法设计简单,易于计算;通过时间稳定性约束,能够克服已有高速公路动态限速控制的缺陷,减少限速控制的时间不稳定性,有效提高高速公路的交通安全。

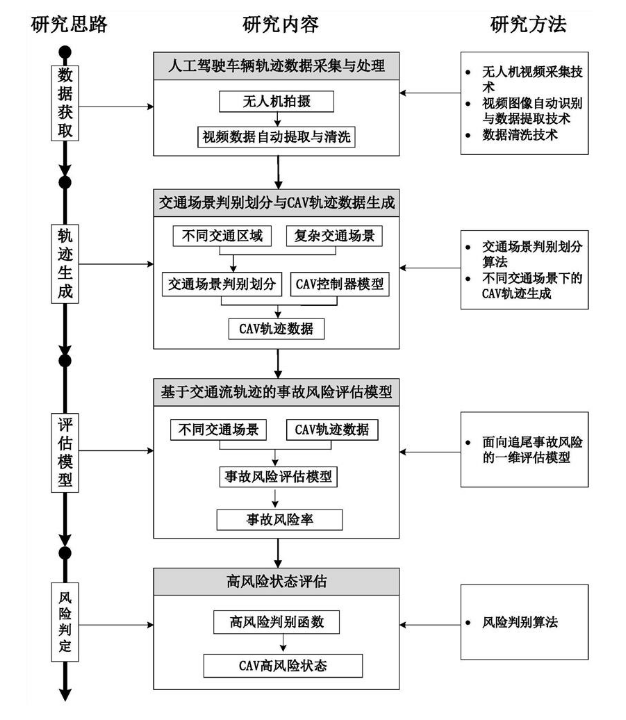
本发明公开了一种基于交通轨迹数据的CAV状态判定方法、装置、设备及介质,所述方法包括:获取若干人工驾驶车辆在实际道路交通中的轨迹数据,其中轨迹数据包括位置、速度和加速度信息;将所有人工车辆分为K个跟驰车组;根据每个跟驰车组后车的轨迹数据,判断该跟驰车组的交通场景为稳态跟驰或者非稳态跟驰;根据每个跟驰车组前车和后车的轨迹数据,生成新的轨迹数据并作为与该跟驰车组对应的CAV的轨迹数据;将每个CAV替换对应跟驰车组的后车;并针对每个替换后的跟驰车组,根据CAV的轨迹数据和前车的轨迹数据,对该对应CAV进行事故风险判定。本发明改善了CAV评估环境的真实性,可以对基于实际交通轨迹数据的CAV高风险状态进行有效判定。

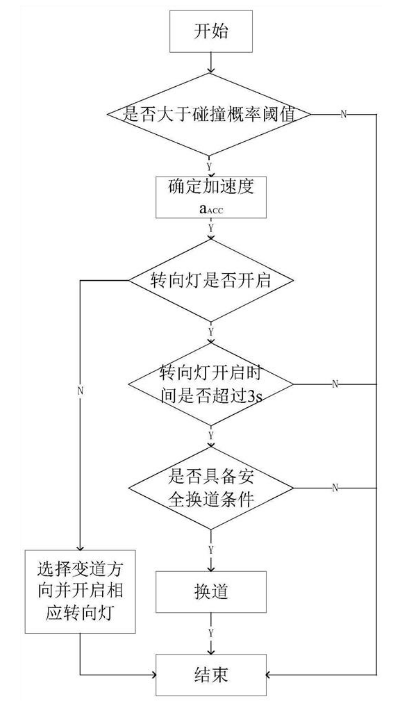
本发明公开了一种自动驾驶车辆后端防撞控制方法、系统、计算机、存储介质,其中,该控制方法包括:S1:采集自动驾驶车辆以及所述自动驾驶车辆当前车道上相邻后车的车辆信息,并基于车辆信息计算出临界反应时间;S2:基于所述临界反应时间计算出当前所述后车与所述自动驾驶车辆的碰撞概率,若所述碰撞概率高于预设阈值,控制所述自动驾驶车辆处于后端防撞控制模式,否则,控制所述自动驾驶车辆处于自动驾驶的原始控制模式。本发明通过上述控制方法有效降低自动驾驶发展过度阶段中人工驾驶与自动驾驶混合流情况下,由于人工驾驶车辆驾驶员分心、操作失误等造成的追尾风险,有效提高自动驾驶发展过渡阶段的高速公路交通安全。

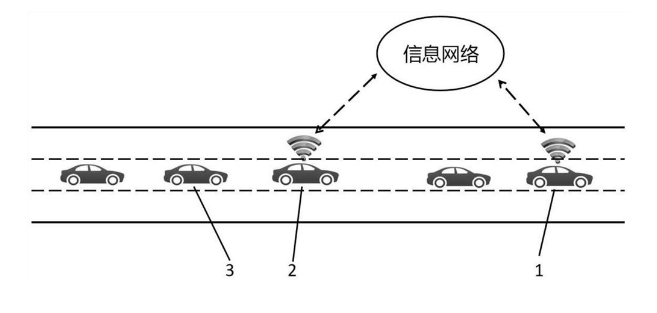
本发明公开了一种基于智能网联车辆的动态限速控制方法、系统、终端及可读存储介质,该方法通过智能车载信息终端信息网络二者之间的紧密衔接,在路段下游存在交通瓶颈的场景下,利用智能网联车辆领导人工驾驶车辆组成车队进行动态限速控制,以提高高速公路限速控制的安全性,降低限速控制的成本,减少道路交通事故率,提升高速公路交通安全与效率。其中,基于动态限速控制模型控制车队中头车的减速参数,进一步利用动态限速控制模型构建神经网络模型,应用到车速控制过程。本发明能够克服已有高速公路动态限速控制的缺陷,有效提高高速公路的交通安全,适用于未来网联车与非网联车混行条件下的高速公路交通安全管控。

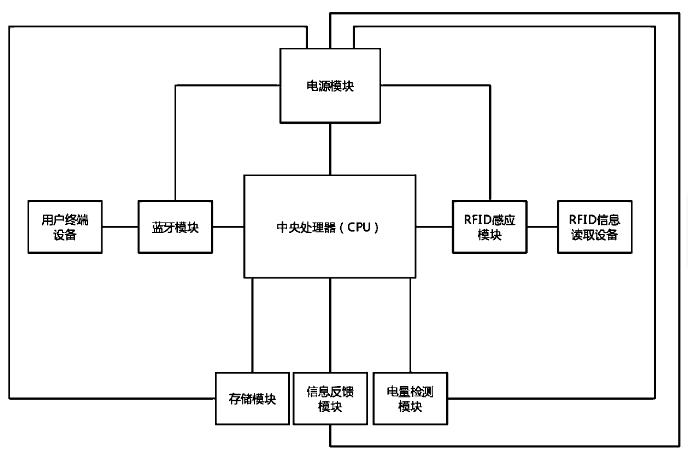
本实用新型公开了一种智能派送信息卡,包括卡片本体以及设置于卡片本体的中央处理器、蓝牙模块、RFID感应模块、存储模块和电源模块;所述蓝牙模块、存储模块和RFID感应模块,均与中央处理器连接;所述蓝牙模块、存储模块、RFID感应模块和中央处理器,均与电源模块连接。一方面通过蓝牙模块与用户终端无线通信,从用户终端获取用户个人信息;另一方面由RFID信息读取设备与RFID感应模块通信,将智能派送信息卡中存储的用户个人信息发送给派送系统服务端,从而实现用户与派送系统服务端之间的交互,因此派送系统服务端在获取用户个人信息数据过程中,有效保障了用户个人信息的隐私安全。