为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

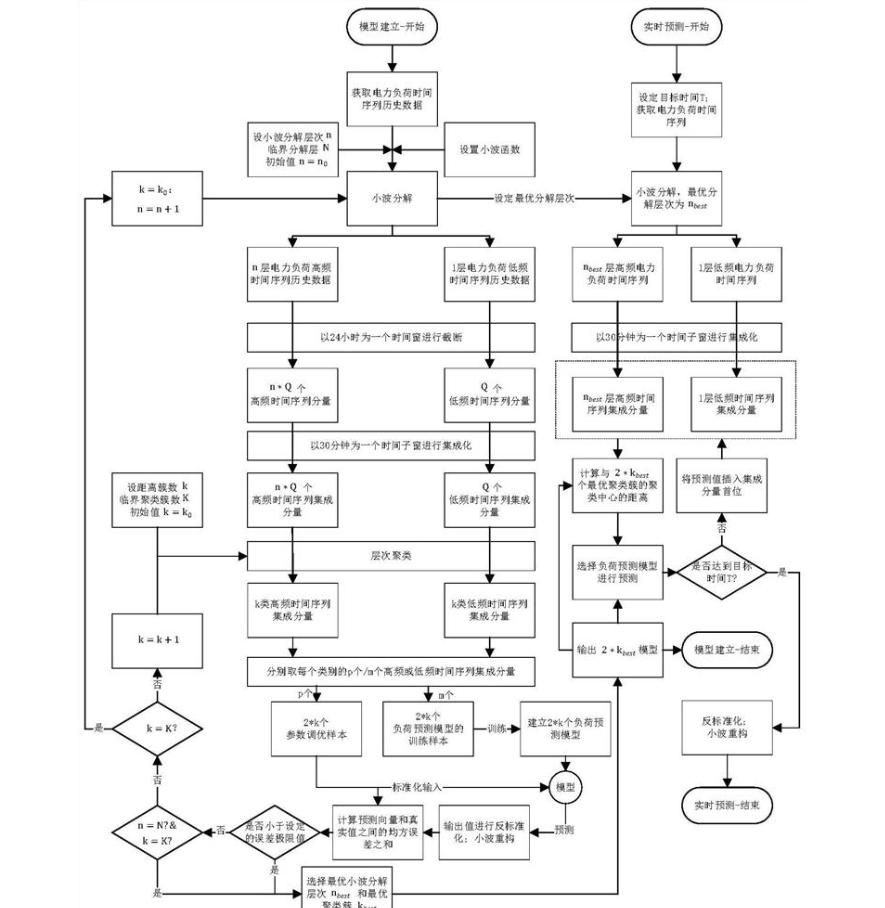
本发明公开了一种电力负荷时间序列大数据智能建模与预测方法,对电力负荷时间序列历史数据进行小波分解,将电力负荷时间序列历史数据分解为电力负荷高频时间序列历史数据和低频时间序列历史数据,然后对所有时间序列进行集成化处理,对时间序列进行聚类,对每种聚类类别的时间序列基于Elman神经网络建立负荷预测模型,最后对预测的分解后的电力负荷进行重构,完成对电力负荷时间序列的智能建模,从而实现对不同特征的电力负荷进行高效、智能预测。

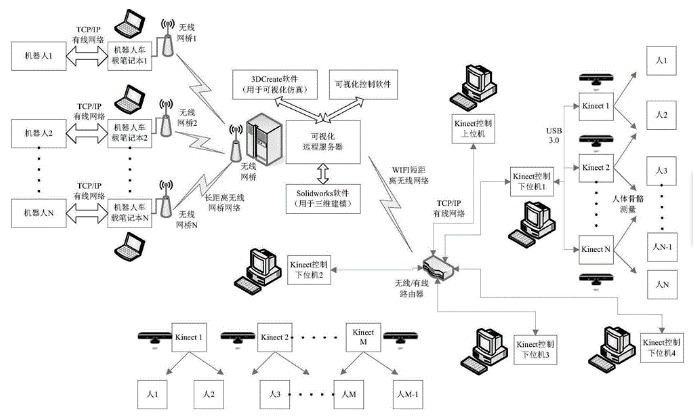
本发明公开了一种机器人运输虚拟可视化控制方法及系统,运用Solidworks对机器人及所在的仿真环境建立三维模型,并将建立的三维模型导入3DCreate中;通过3DCreate平台中的Python API编程进行可视化仿真参数定义;将机器人以及仿真环境中部件的运动状态信息发送至可视化远程服务器;对收到的信息进行过滤和匹配,将过滤和匹配后的信息利用3DCreate的COM API加载给3DCreate可视化环境中的对应三维模型上,驱动各个三维模型同步显示。通过对信息的过滤和匹配,滤去了大量的与可视化无关的硬件指令信息,将可视化仿真中的信息处理速度得到了质的提升,准确将机器人动作进行可视化仿真。

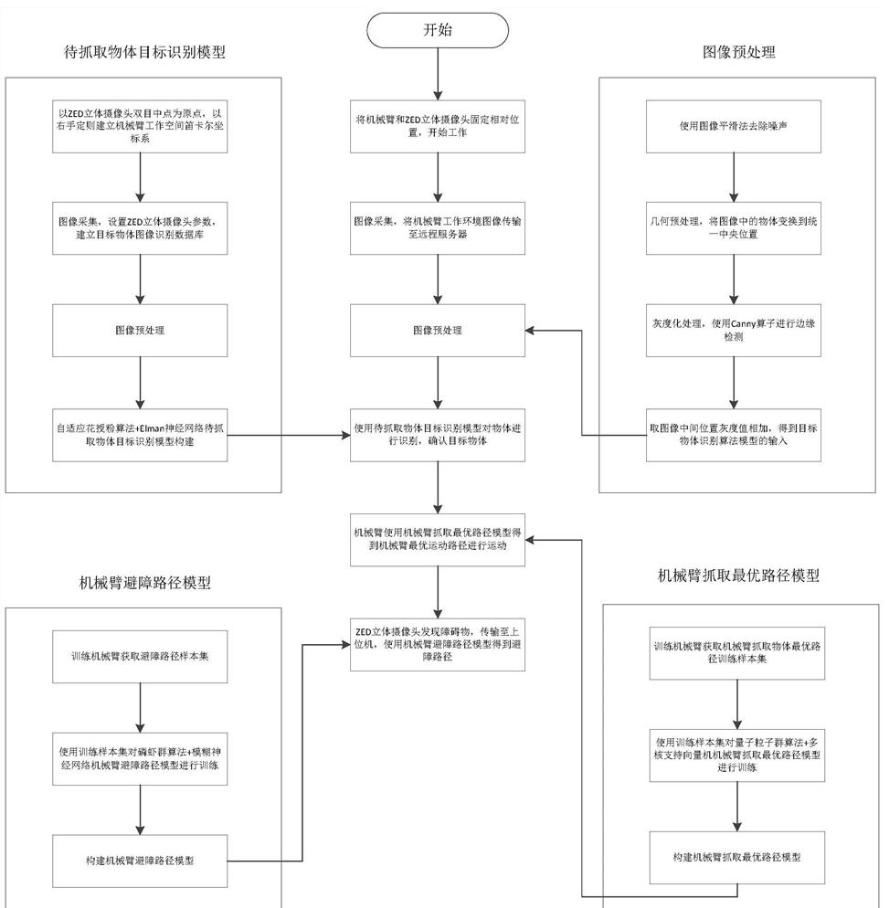
本发明公开了一种工业机器人手臂视觉防撞操控方法,包括以下步骤:步骤1:构建机械臂所在工作空间的三维坐标系;步骤2:构建基于Elman网络的待抓取物体目标识别模型;步骤3:构建基于多核支持向量机的机械臂抓取最优路径模型;步骤4:实时采集待抓取物体目标图像识别物体类别;步骤5;基于物体类别确定物体重心,求得抓取终点坐标,获取机械臂抓取最优路径,驱动机械臂抓取物体;该方法采用智能算法计算得到机械臂抓取目标物体一条无碰撞、动力学特性满足裕度要求、轨迹长度和运动时间较短的理想轨迹,大大提高了生产效率,同时节约了人员成本,给工厂带来收益。

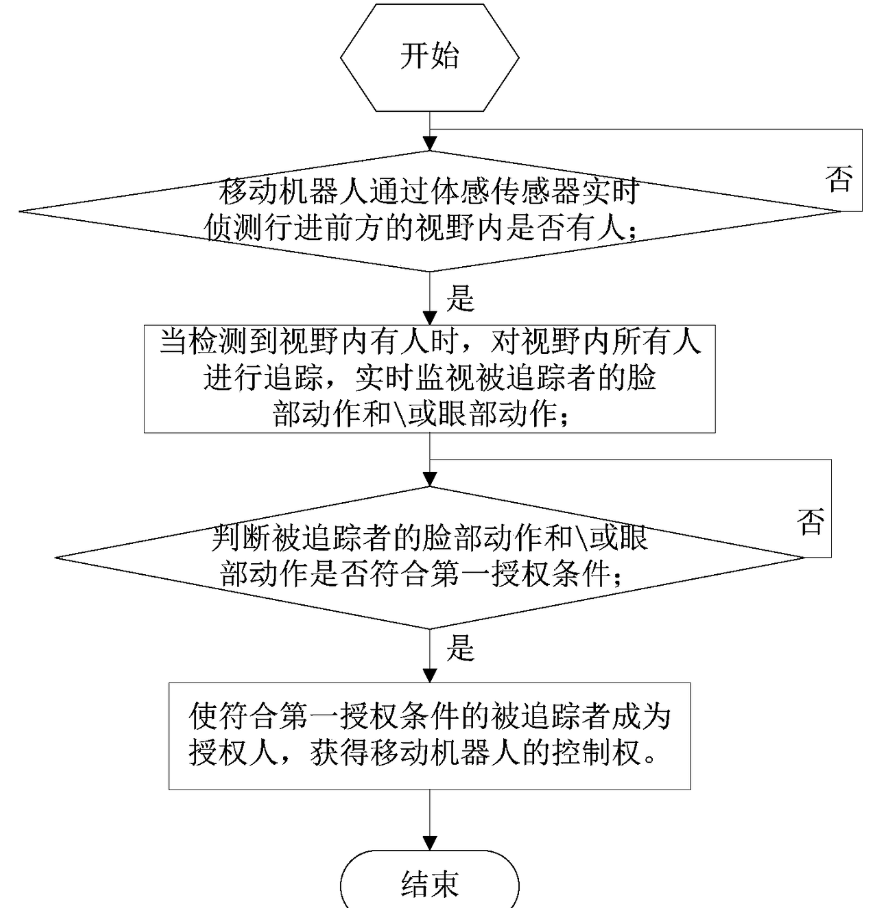
本发明公开了一种基于人脸识别的移动机器人人机交互控制方法,包括步骤:移动机器人通过体感传感器实时侦测行进前方的视野内是否有人;当检测到视野内有人时,对视野内所有人进行追踪,实时监视被追踪者的脸部动作和\或眼部动作;判断被追踪者的脸部动作和\或眼部动作是否符合第一授权条件;使符合第一授权条件的被追踪者成为授权人,获得移动机器人的控制权。如果机器人在安全距离内没有发现符合授权条件的授权人,它将以语音形式发出控制提醒信号。本发明采用脸部动作和\或眼部动作进行指令识别,识别准确率高计算迅速,不受电梯、工厂等拥挤嘈杂的环境限制,使得人机交互更自然准确,移动机器人应用更广泛、方便和安全。

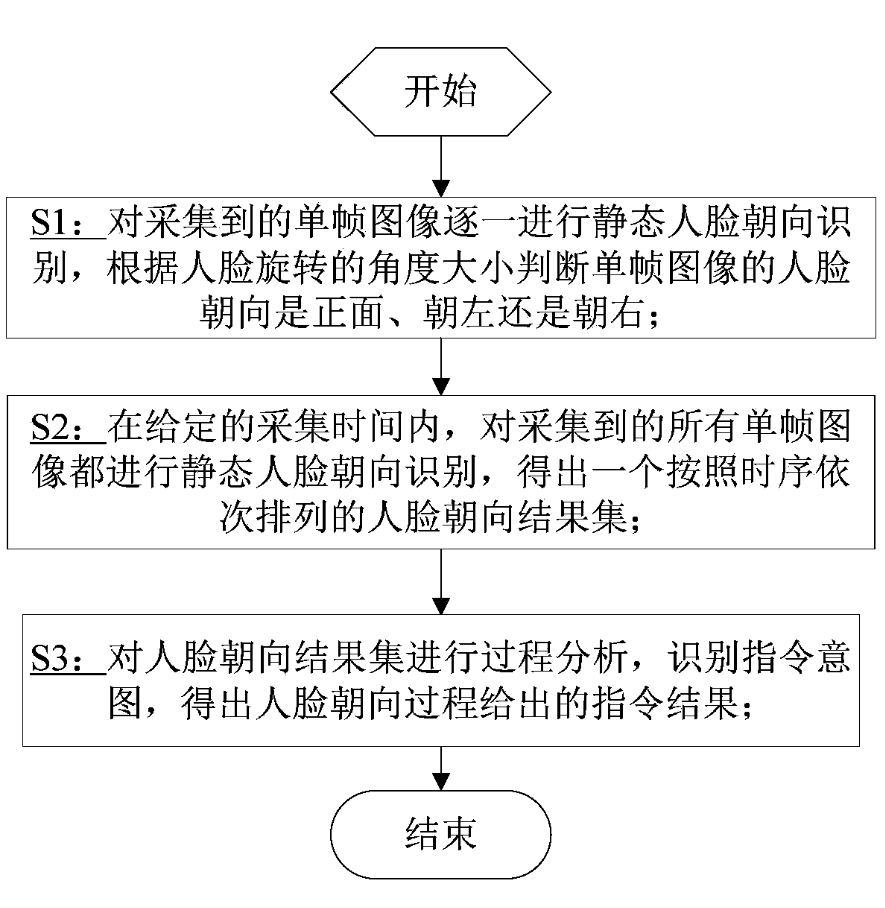
本发明公开了一种基于灵敏度参数的人脸朝向识别方法,包括步骤:S1:对采集到的单帧图像逐一进行静态人脸朝向识别,根据人脸旋转的角度大小判断单帧图像的人脸朝向是正面、朝左还是朝右;S2:在给定的采集时间内,对采集到的所有单帧图像都进行静态人脸朝向识别,得出一个按照时序依次排列的人脸朝向结果集;S3:对人脸朝向结果集进行过程分析,识别指令意图,得出人脸朝向过程给出的指令结果。本发明结合简单的面部特征与实时捕捉头部动态过程结果作为相应指令匹配方式,能准确识别移动机器人人机交互过程中的面部转动指令,这种方式自然而且表达清晰,不受环境的限制,适用范围广。