为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

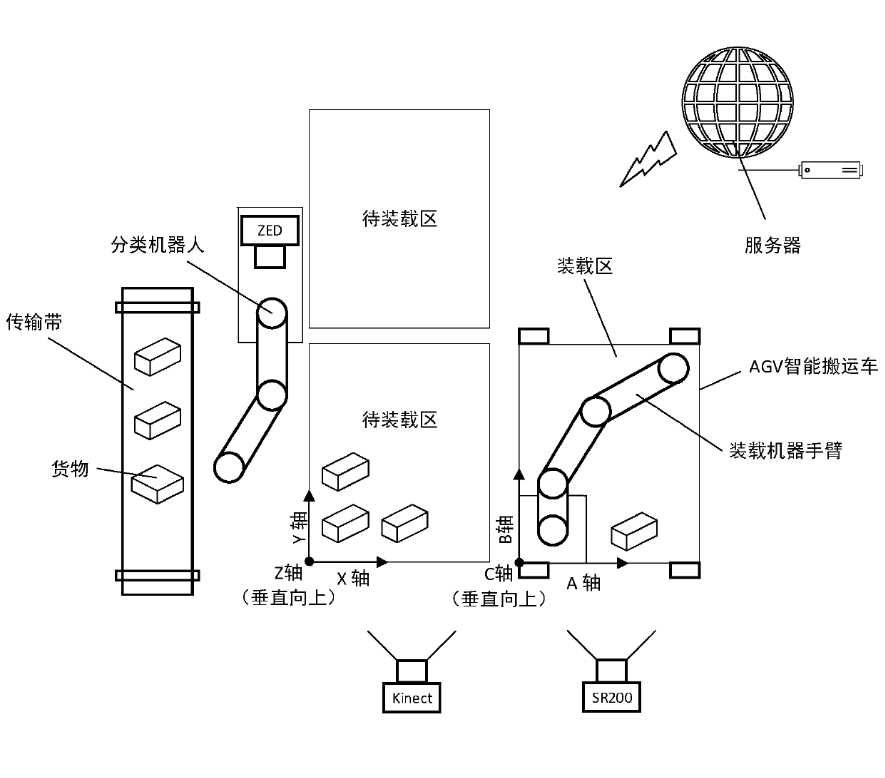
本发明公开了一种智慧物流环境机器人装载方法与装置,该方法包括以下步骤:步骤1:实时获取货物信息;步骤2:计算货物在运送地址对应的待装载区放置位置坐标;步骤3:利用分类机器人将货物从传输带夹取至用于暂存的对应待装载区;步骤4:计算货物将在AGV智能搬运车的装载区终点位置坐标;步骤5:依据智能搬运控制模型获得的控制矩阵将货物搬运至AGV智能搬运车的装载区上。结合机器视觉自动获取货物尺寸、货物运送地址、货物位置坐标等信息,通过建立神经网络模型来利用分类机器人与智能搬运车对货物进行自动智能分类与装载,大大的减少装载错误率,提高装载效率。

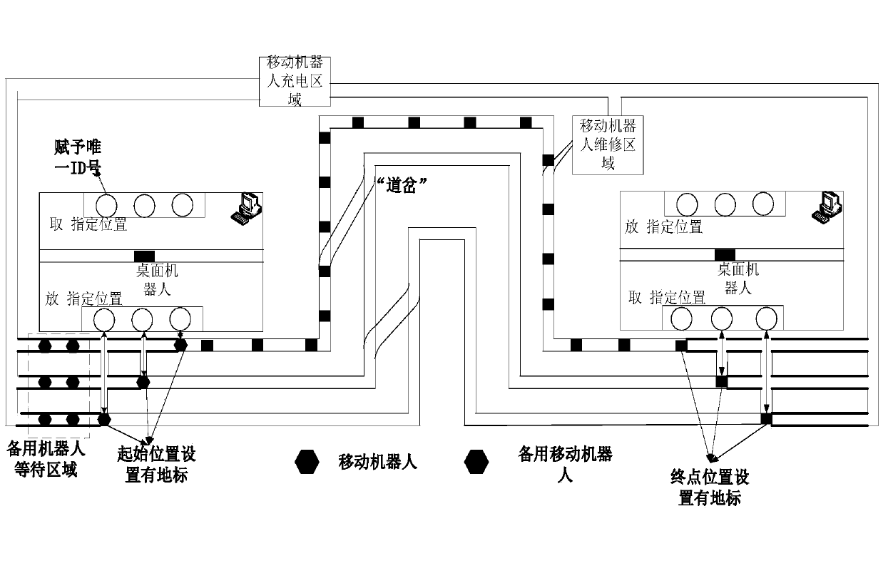
本发明公开了一种智能制造环境机器人及车辆计算智能驱动运载方法与系统,该方法包括以下步骤:步骤1:在不同工作台之间设置地面导轨,在工作台上设置一条桌面导轨;步骤2:位于取物工作台的桌面机器人从取物工作台上的取物指定位置抓取物体;步骤3:移动机器人沿地面导轨移动并抓取物体运输至另一工作台;步骤4:位于放物工作台的桌面机器人抓取物体后,移动至放物工作台的放物指定位置,完成物体在工作台之间的运输;步骤5:结合灰度神经网络和PID神经网络,建立电量预测模型对移动机器人下一步行动进行决策。通过桌面机器人和移动机器人的协同工作,完成自动化实验室物体的定时、定点运输,配合移动机器人充电区域的设置,实现自动化实验室全天候的运输。

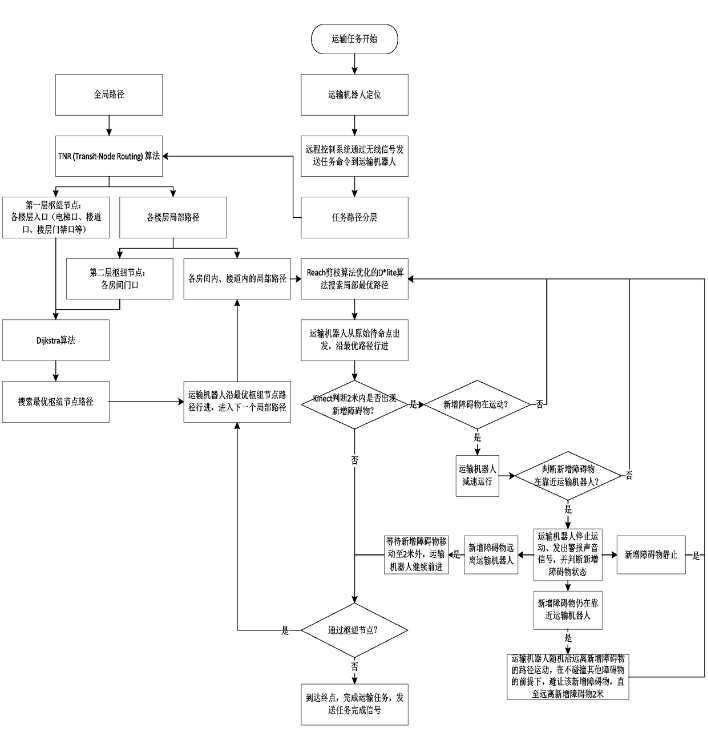
本发明公开了一种智能运载机器人最优路径混合图论控制规划方法,该方法提出对全局路径进行分层规划的思想,以每个房间或楼道的局部最优路径规划作为最小规划单元,寻找各楼层中的最优枢纽节点,将各个房间或楼道的局部最优路径连通,得到单个楼层的最优路径,最后将楼层之间的最优路径进行连通,得到完整的全局最优路径,分层规划的设计,大大的降低了路径规划过程中的计算量,能够快速实现路径规划。

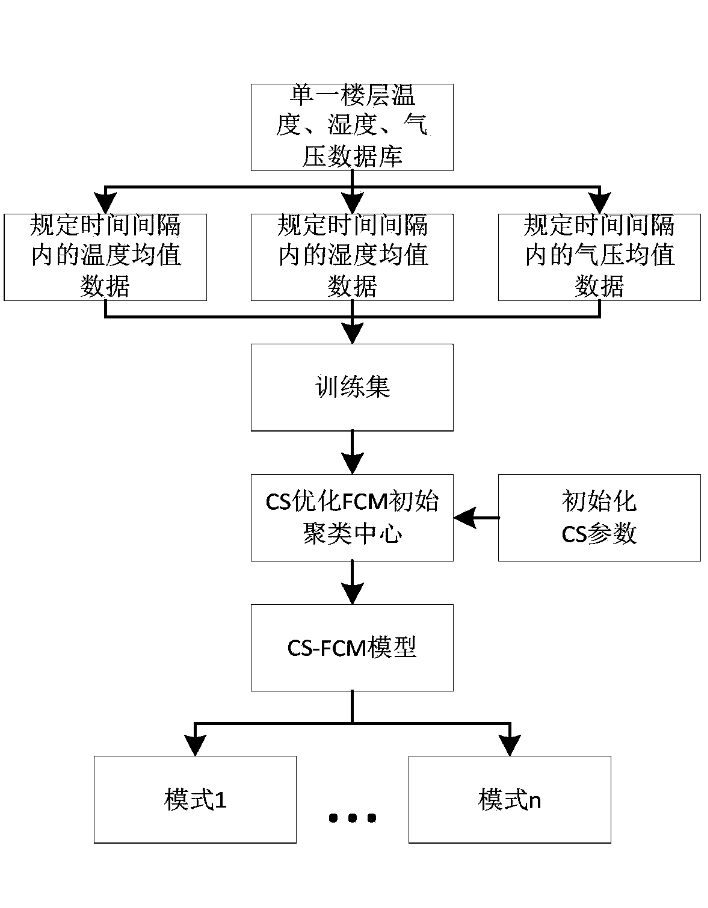
本发明公开了一种基于气象传感时序模式的运载机器人智能识别楼层的方法,包括:步骤1:构建楼层信息数据库;步骤2:对楼层信息数据进行聚类,得到每个楼层的天气模式集合;步骤3:获取用于构建基于天气模式的气压楼层预测模型的训练集合;步骤4:构建基于天气模式的气压楼层预测模型;步骤5:利用机器人当前所在楼层层号和天气观测值,调用对应天气模式的气压楼层预测模型;步骤6:利用机器人实时采集的气压和气压楼层预测模型,预测机器人所在楼层层号;该方法利用简易的温度、湿度、气压传感器搜集数据,建立环境数据库,并针对气压随高度变化而变化的特性,采用数据挖掘技术,实现机器人在不同环境条件下的电梯楼层自动高准确度、高稳定性识别。

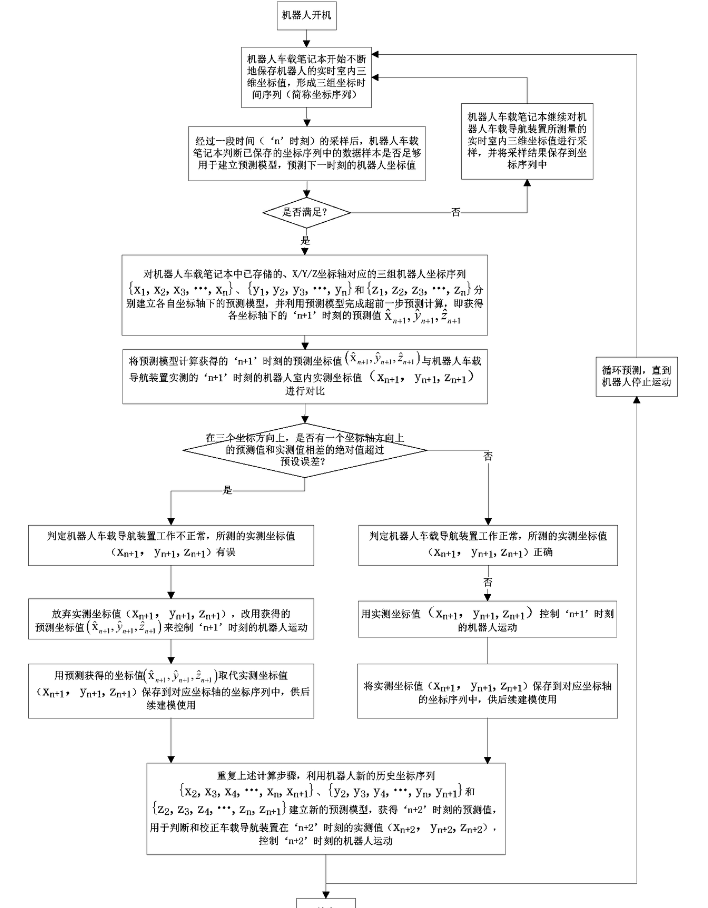
本发明公开了一种实现机器人车载导航装置实测坐标校正与预测的方法,通过利用机器人对导航设备/装备所提供的实时实测的室内坐标值进行正确性判断,对所提供的错误或有偏差的坐标值进行修正;在预测下一个时刻的坐标过程中,采用快速集成经验模式分解算法、增广迪基富勒检验模型、卡尔曼滤波算法以及加权处理完成预测,使得预测精度得到保证的同时,大大的降低了预测的复杂性,并且克服了重复性差的问题,整个过程实现简单,本发明避开了常规的抗干扰性思考,采用的一种巧妙解决干扰信号严重问题的新思维,实现了准确的高实时性的机器人室内导航的预测。