为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

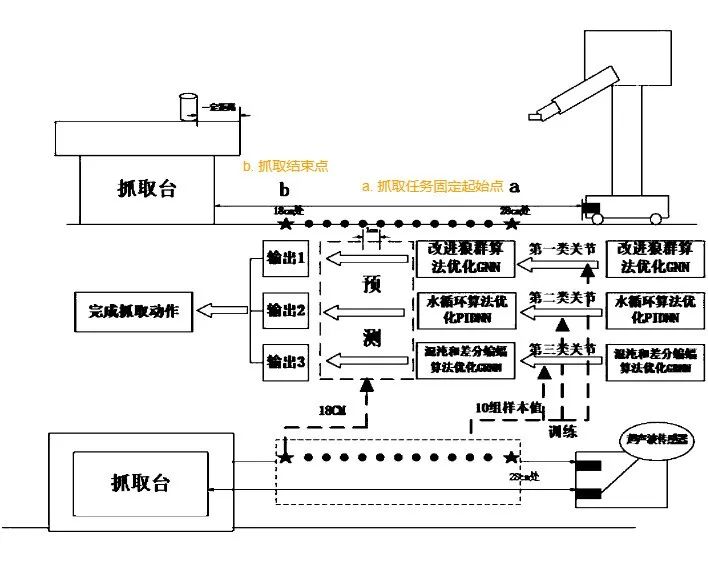
本发明公开了一种运载机器人手臂操控自适应混合学习映射智能控制方法及系统,包括以下步骤:步骤1:利用远程服务器控制运载机器人手臂重复进行多次抓取训练,获得抓取样本集;步骤2:按照手臂运动耗电量选取初始训练样本;步骤3:依据各手臂关节控制值的变化幅度对初始训练样本进行关节分类,获得各类关节样本集;步骤4:利用关节样本集作为最终训练集构建运载机器人手臂关节控制值的预测模型;步骤5:依次输入各个移动点的位置到预测模型,得到各个移动点位置上的各个关节的控制值,完成将抓取任务。本发明通过建立机器人基座、抓取台之间距离与机器人手臂姿态之间的映射,避免了繁琐的运动学方程建立;获取准确的关节控制值,控制灵活。

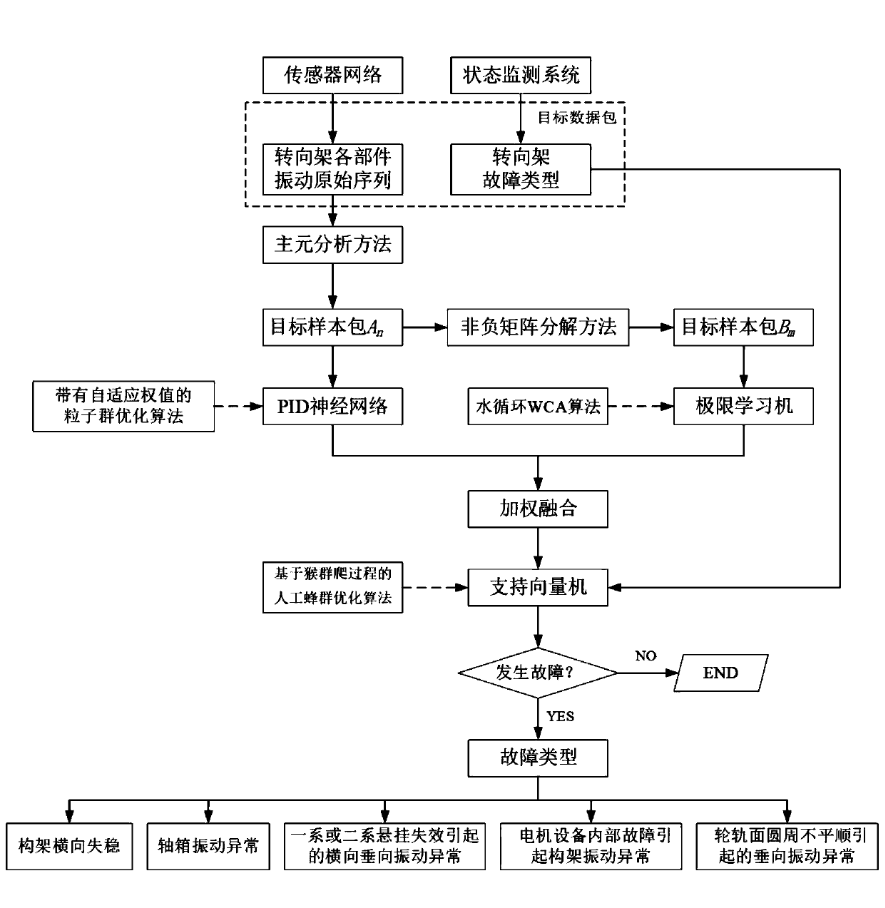
本发明公开了一种多层次多模式特征提取的智能机械系统故障诊断方法,包括步骤:获取待检测机械部件的原始振动序列;采用主元分析法对原始振动序列进行第一次特征提取,得到待检测机械部件的第一目标样本;采用非负矩阵分解方法对第一目标样本进行第二次特征提取,得到待检测机械部件的第二目标样本;使用基于PID神经网络和极限学习机训练得到的两个振动序列预测器,分别对两个目标样本进行预测得到两个预测振动序列,并进行加权融合得到融合预测振动序列;使用基于支持向量机训练得到的智能机械系统故障分类模型,根据融合预测振动序列输出待检测机械部件的故障类型。本发明对机械部件故障诊断的准确性高、鲁棒性和时效性强。

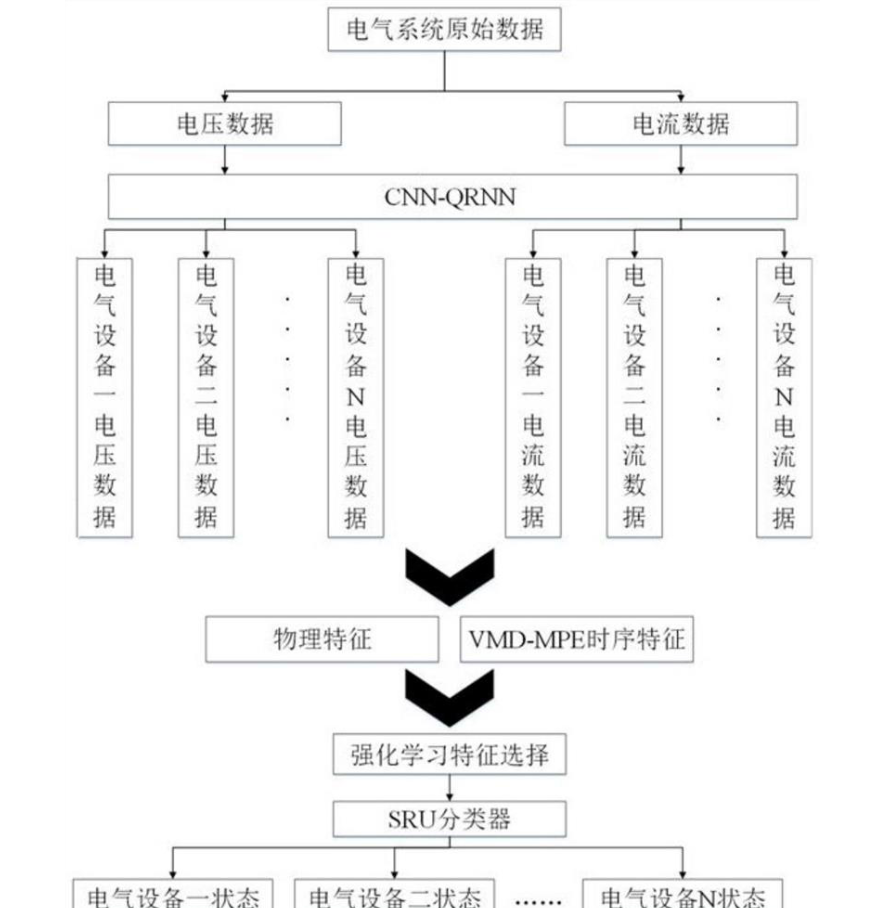
本发明公开了一种无人驾驶列车车载电气系统故障非侵入诊断方法,包括:采集不同已知故障类型下的多组建模数据;基于以总电压和总电流时间序列作为输入向量、以各电气设备的电压和电流时间序列作为输出向量的深度学习模型,获得训练好的深度学习模型;提取电力特征;确定特征选择方法和分类器;采集多组实测数据,将实测数据对应的总电压时间序列和总电流时间序列作为输入向量输入深度学习模型,提取实测数据经由深度学习模型后输出的各输出向量中的电力特征,对实测数据对应的电力特征进行选择,并将其输入分类器,分类器输出待诊断的电气系统的故障类型。本发明的电力负荷分解准确性高,电力特征分析性能高,故障诊断结果准确性高,时效性好。

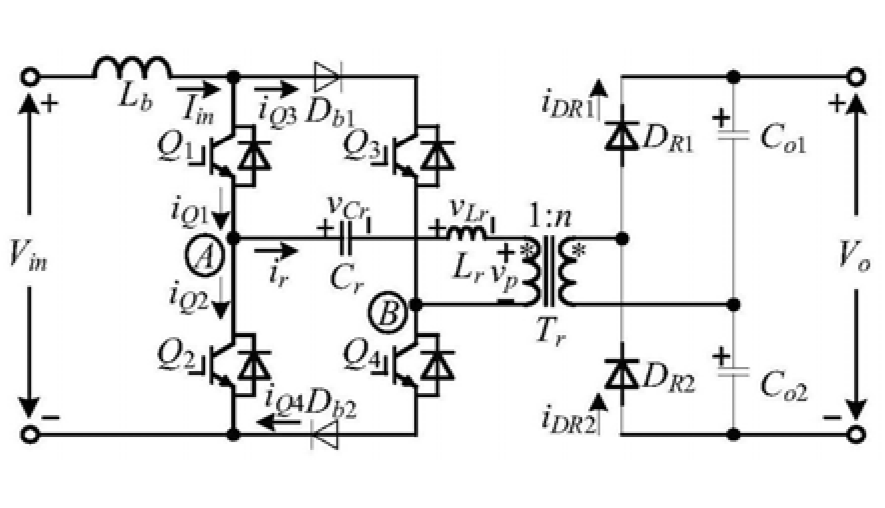
本发明公开了一种单级式Boost全桥升压零电流开关直流变换器及其控制方法,变换器原边由一个升压电感、LC串联谐振腔和全桥模块组成,其中全桥模块滞后桥臂的两个开关管分别正向串联一个二极管,以防电流反向流通,而副边为倍压整流电路,原副边通过高频变压器连接。变换器采用定频移相PWM控制。超前桥臂的两个开关管驱动具有相同的大于0.5的占空比,且相位差半个开关周期。滞后桥臂的两个开关管驱动占空比均为0.5,且相位差半个开关周期。两个桥臂对角线上的开关管驱动之间具有一个移相角,超前桥臂的驱动占空比与该移相角满足一个固定关系式,通过控制该移相角可以调节传输功率和升压比的大小。本发明可以实现所有半导体器件的零电流开通和关断。

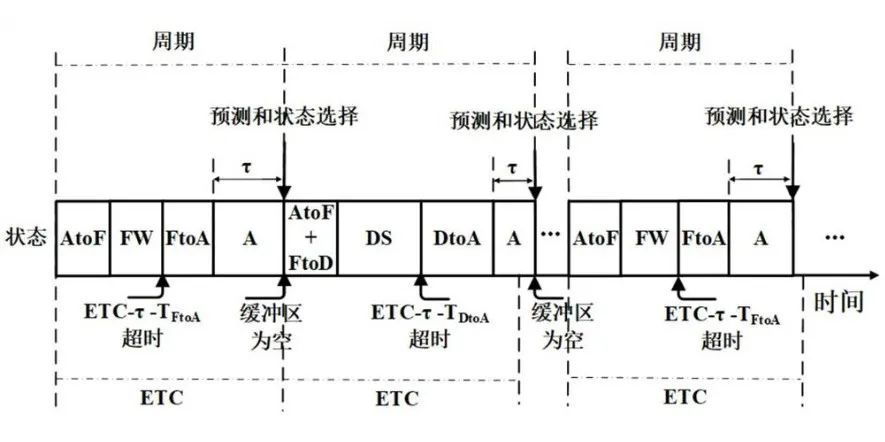
本专利公开了一种基于预测的40100Gbps以太网节能策略实施方法。IEEE802.3bj标准为40100Gbps节能以太网(Energy Efficient Ethernet,EEE)定义了快速唤醒(Fast Wake)和深度睡眠(Deep Sleep)两种节能状态,不同节能状态对应的节能量和状态转换延迟不同。基于预测的40100Gbps以太网节能策略在保证数据帧尾延迟不超过预定期望延迟的前提下,周期性地根据历史信息预测下一个周期内数据帧的到达数量,并基于此预测结果选择下一周期内使用的节能状态以及控制EEE离开节能状态的时机,从而在提升节能量和减少尾延时两方面取得较好的折中。实验结果表明,本专利设计的基于预测的40100Gbps以太网节能策略能够在将数据帧的尾延迟控制在期望值内的同时,相比于现有节能策略达到更优的节能效果。