为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

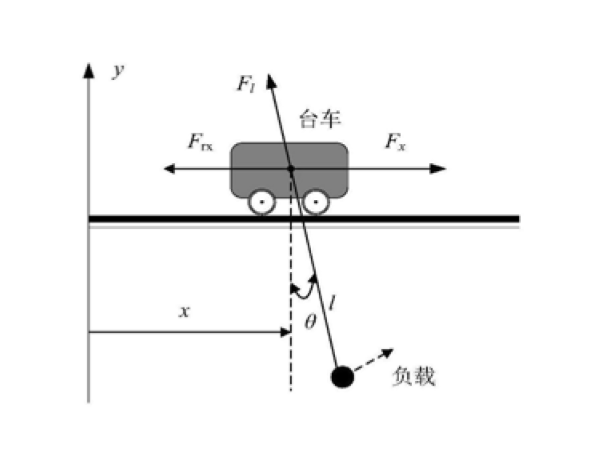
本发明公布了一种欠驱动吊车微分平坦跟踪控制方法,其特征在于:利用sigmoid函数,构造包含加速、匀速、减速全过程、光滑连续且能满足实际物理约束的新型加速度轨迹;将含负载升降的吊车动力学模型进行变换,得到负载横向运动和竖向运动的微分平坦输出方程,将微分平坦输出方程化成积分串联形式,设计线性扩张状态观测器估计负载横向与竖向运动的各阶状态及总和扰动;将各时刻负载横向和竖向运动各阶状态的理想值与实际值或估计值进行比较,得到状态误差,并对总和扰动进行补偿,进而构建负载横向和竖向运动的误差反馈控制律,使伴有负载升降的吊车在外界干扰下,能沿着期望轨迹将负载平稳快速地搬运到目标位置,并有效抑制负载运输过程中的摆动。

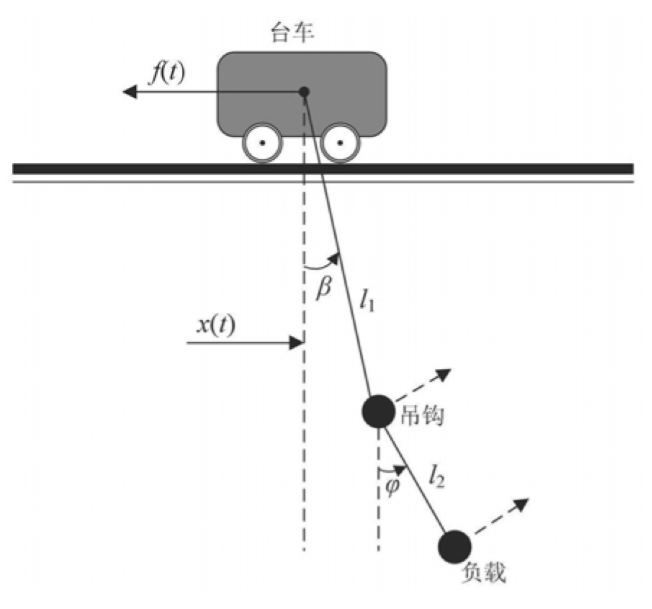
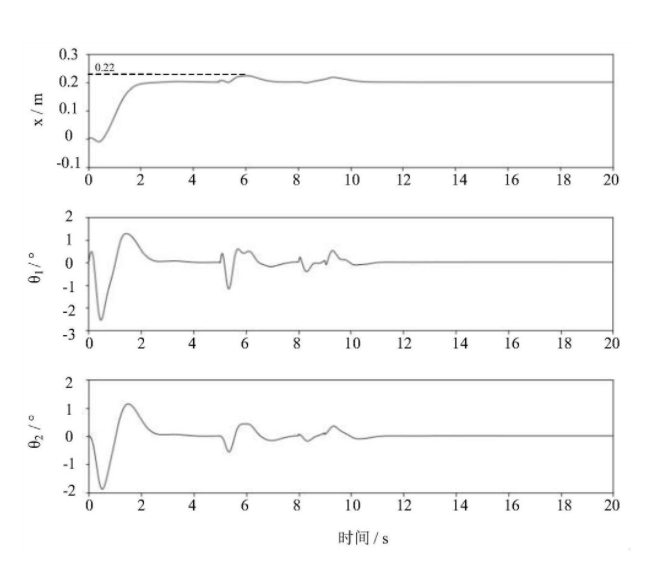
本发明公布了一种基于负载摆动状态观测的双摆型吊车滑模控制方法,其特征在于:首先根据双摆型吊车的动力学模型推导吊钩摆动、负载摆动之间的耦合关系,然后利用有限的模型信息、负载摆动与吊钩摆动之间的耦合关系,设计线性扩张状态观测器(LESO)观测负载摆动,使其能够在吊钩与负载重心距离未知的情况下对负载摆动进行高精度观测,起到了替代负载摆动传感器的作用,解决了负载摆动的测量难题,通过将负载摆动的观测值反馈到滑模控制器中,得到了双摆型吊车消摆定位控制器,实现了在不直接测量负载摆动的情况下双摆吊车的定位消摆反馈控制。

本发明公布了一种全驱动MIMO系统的自抗扰控制方法,其特征在于:利用统一的线性扩张状态观测器(LESO)对系统中的耦合部分、非线性部分及扰动部分进行估计,通过根据扩张状态观测器的观测结果及控制目标设计合适的控制律,实现系统各环节的自抗扰控制;通过将LESO的带宽与由系统硬件决定的迭代步长相关联,将3m个LESO的增益转化为由系统硬件决定的常量;通过将反馈控制量增益与Hurwitz稳定矩阵的特征值配置相关联,将2m个待确定的反馈控制增益转化为一个待整定参数。本发明用一个LESO解决了MIMO系统的状态观测问题,用一个线性控制器(LSEF)实现了MIMO系统各状态量的控制,将复杂的参数整定过程变成易实施的单参数调整,使得控制器结构简单、紧凑,参数整定容易、工作量小。


本发明公布了一类欠驱动多输入多输出系统的集中式自抗扰控制方法,其特征在于:将欠驱动系统分为直接驱动部分和间接驱动部分,根据直接驱动部分的当前状态和目标状态,设计直接驱动部分的虚拟控制量;利用统一的扩张状态观测器对欠驱动部分的扰动和不确定部分进行统一估计并补偿,并设计间接驱动部分的虚拟控制量;将直接和间接驱动部分的虚拟控制量有机组合后形成综合控制量,实现了欠驱动系统的集中控制;运用Lyapunov方法将控制系统的反馈控制增益和系统误差方程中Hurwitz稳定矩阵极点配置相关联,保证了系统的稳定性,也将待整定的控制系统增益集中为极点配置一个参数;整个控制系统结构紧凑,鲁棒性和抗干扰能力强、参数整定容易,具有通用性。

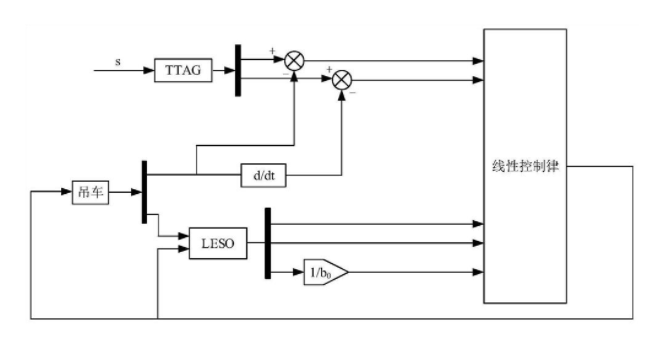
本发明公布了一种单参数调整的欠驱动吊车作业全过程自抗扰控制方法,其特征在于:根据台车起始及目标位置,考虑台车速度、加速度及作业环境等安全性约束条件,生成效率优先的台车理想作业轨迹,并和台车实际位置进行对比后,构造台车运动的误差反馈控制律;根据吊车负载摆动状态方程设计扩张状态观测器,并构造抑制负载摆动的误差反馈控制律,进而形成不依赖于系统模型参数、且能有效抑制扰动的台车作业轨迹和负载摆动自抗扰控制器;使用Hurwitz稳定矩阵特征值和控制系统增益产生关联,使繁琐的控制系统参数调整转化为很容易实施的单参数调整,实现了在模型参数不确定及外界干扰下吊车能全过程按照设定的理想轨迹运行,并使摆角尽可能小。