为推进专利开放许可工作,提升专利转化水平,本期发布5项专利,具体信息如下:

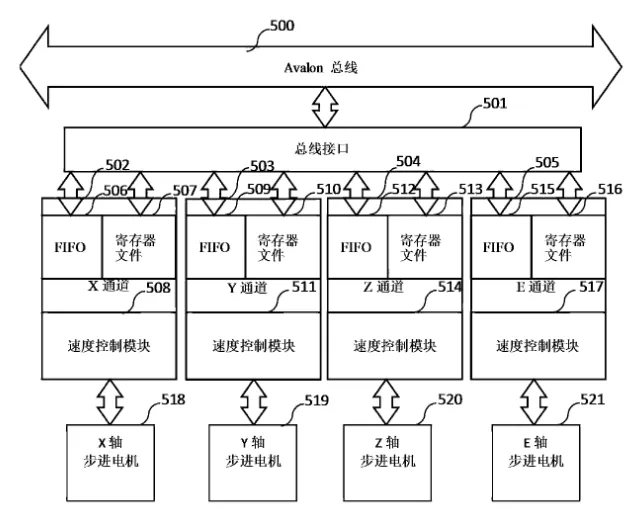
本发明公开了一种熔融层积型3D打印机的步进电机速度控制装置,包括依次连接的通信总线、通信总线接口和4路步进电机控制通道,每个步进电机控制通道内部包含FIFO参数缓存、寄存器文件和速度控制模块,运动数据参数通过通信总线和通信总线接口存入到FIFO参数缓存中,速度控制模块则从FIFO参数缓存中读取相关参数,计算并发出相关步进电机控制信息给步进电机,寄存器文件内部包含了控制步进电机速度控制装置的所有控制寄存器,用于控制步进电机速度控制装置的运转。本发明还公开一种使用该步进电机速度控制装置的FDM型3D打印机驱动控制系统。本发明采用硬件计算和同步驱动方式控制步进电机,有效地提高了电机驱动系统的控制速度和系统稳定性。

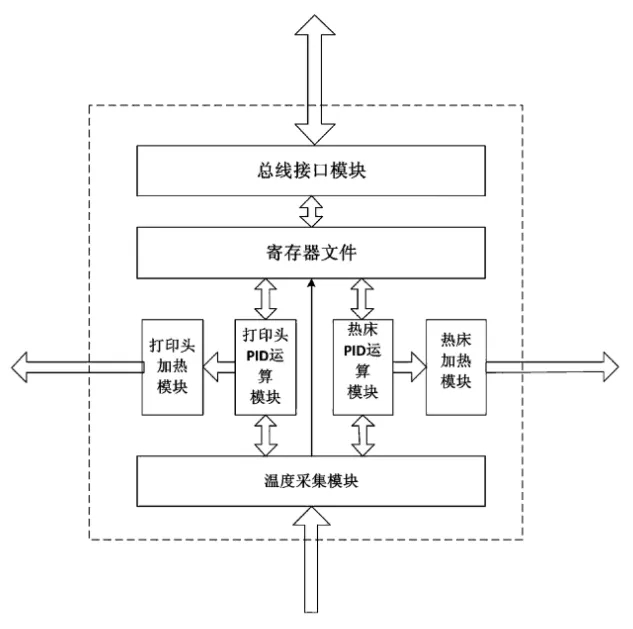
本发明公开了一种3D打印机温度控制系统,包括依次连接的总线接口模块、寄存器文件、PID运算模块及温度采集模块,PID运算模块还连接加热模块,温度采集模块判断采集到的温度,若没有超出预设范围,则将温度数据发送给PID运算模块,PID运算模块计算完成后,输出有效信号和PID控制量给加热模块,加热模块采用PWM方式加热,根据PID控制量的大小通过PWM方法来控制加热的时间,PID运算模块分比例运算、积分运算、微分运算和PID结果运算四个部分、6个周期完成PID运算结果。本发明通过PID运算模块每6个周期即可输出一次PID运算结果,且加热模块采用新型PWM硬件结构,有效提高了温度控制的实时性、精度及稳定性,且降低了CPU负载,有利于3D打印机的功能扩展。

本发明公开了一种3D打印机挤出头运动控制方法及装置,包含一种全新的3D打印机挤出头运动控制机制。挤出头的运动与传统的需要由固件程序来实现控制不同,本发明基于FPGA硬件平台提出了一种正交分解的挤出头运动控制机制。摒弃了原解决方案需要由固件程序分时运行的缺陷,硬件化的设计使得驱动挤出头运行的四个运动轴可同时且独立运行,加快了打印速度。并且,原有解决方案中普遍运用基于Bresenham算法的运动控制机制,这是造成在实际的3D打印中精度不够高的主要因素,在本发明中,采用正交分解的挤出头运动控制机制,挤出头的运行轨迹更加贴合理论路径,很大程度上改善了挤出头走步精度不够高的问题。本发明在提高3D打印速度和打印精度上都有着显著效果。
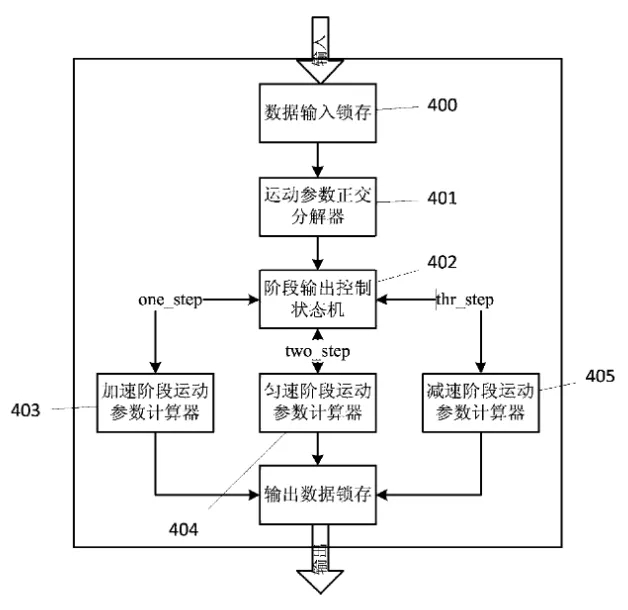

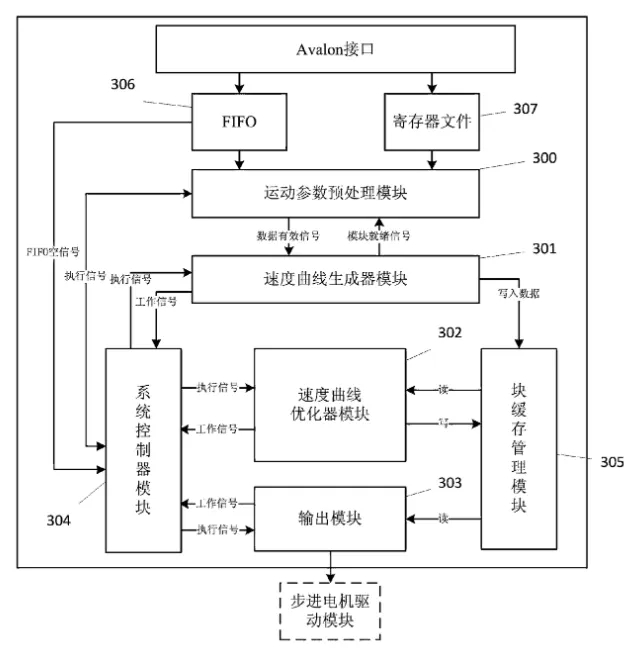
本发明公开了一种3D打印机挤出头梯形速度曲线控制系统,包含一种全新的梯形速度曲线控制机制。与传统的由固件程序来实现梯形速度曲线控制不同,本发明是基于硬件实现速度控制。摒弃了原解决方案需要定时器中断程序驱动挤出头运行的缺陷,所有计算过程用硬件IP核(知识产权核)实现,其划分为几个功能子模块,各自负责不同的功能。硬件化的设计在输出3D打印机挤出头梯形速度曲线时简化了计算过程,释放了CPU的负荷,增强了计算的稳定性,减少了计算时间,为提高3D打印机打印速度做出贡献。

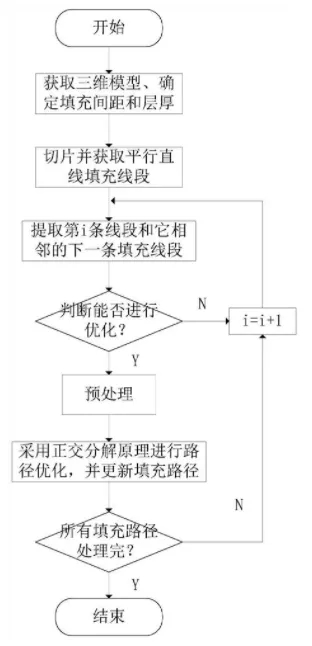
本发明涉及打印技术路径生成领域,公开了一种平行往复直线填充方法及系统,以实现平行往复直线路径中的速度稳定,提高快速成型加工速度,提高制件精度以降低打印机的损耗,进一步提高打印机的效率延长打印机的使用寿命;本发明的方法包括获取待打印的三维实体的三维模型,并确定填充间距d;对三维模型进行切片分层,采用已有的平行往复直线填充方法获取三维模型的每一层在平面内的平行直线填充线段;遍历平行直线填充线段,并判断同一层中的相邻两条平行直线填充线段是否符合路径优化条件;将优化后的路径替代原本的平行直线填充线段,更新每个层的填充路径。