
本成果涉及智慧农业收获技术,主要包括平菇采摘机器人技术以及辣椒无人分拣技术。
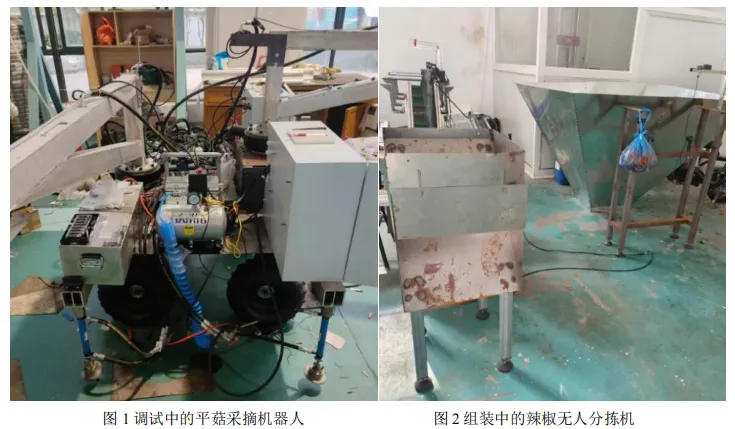
1.平菇采摘机器人技术
机器人能沿着轨道在棚与棚之间转场,根据蘑菇大小、生长方向,自动识别并采摘。采摘后的蘑菇,通过机器人放入筐子,再通过轨道车转移至指定区域。机器人能与运输车协同运作,采用车-车协同网联技术。设计仿生学柔性手指,蘑菇不破损。开发了“臂架伸缩+车辆移动+采摘”的多机协同控制技术,臂伸缩和车移位都不停止采摘,提升采摘效率。
2.辣椒无人分拣技术
辣椒分拣机器人技术,在无人协助的情况下,能够自动将仓中辣椒进行摊铺、传输、识别,按照类别挑选、拾取、放置在指定位置,遇故障自动诊断、警报、停机。
平菇是种最常见的食用菇,在河南、山东、河北、吉林、四川、江西、上海、湖南等低广泛种植。2021 年产量约 692.3 万吨。目前,在劳动力奇缺、国家智慧农业政策扶助大环境下,平菇采摘机器人一台机器能达到 6-8 个棚/天的工作量,大约 60-80 分钟/棚,具有广阔市场前景;辣椒无人分拣机日分拣产量可达 2 万斤,在劳动力越来越匮乏的当今农业领域,本技术可以和智能物流结合,实现无人分拣、打包全链条。

中试

已获授权专利5项

(未经授权禁止转载)


